L2. System Analysis¶
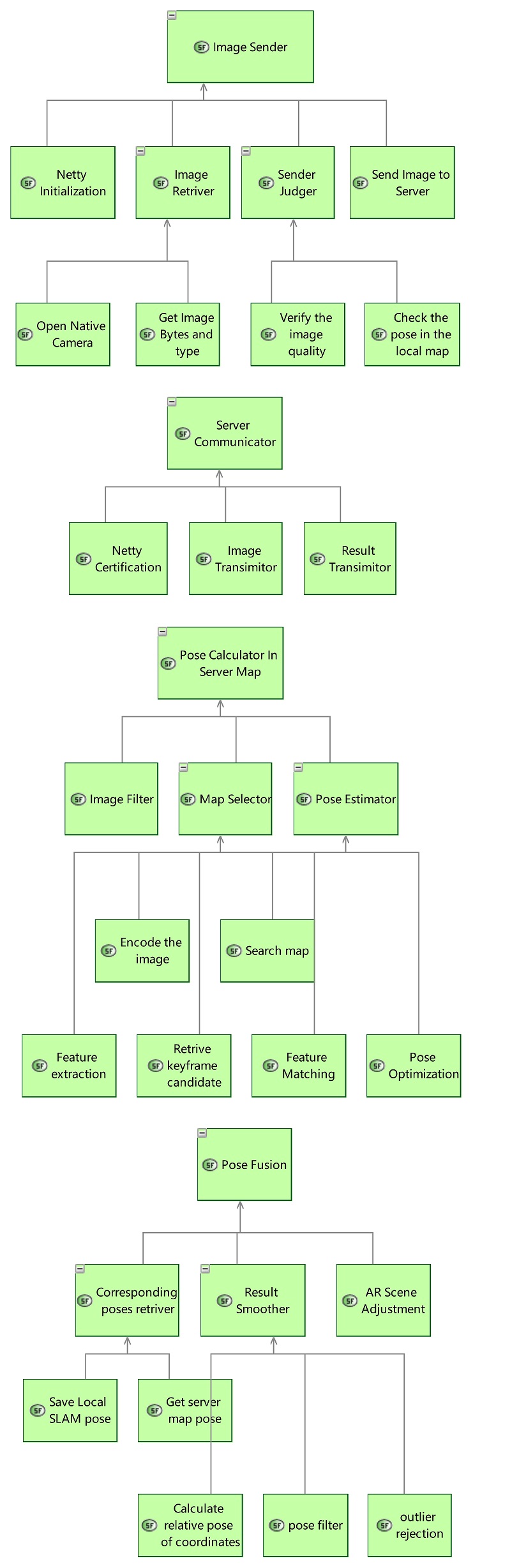
1.1 Sytem Function Breakdown¶
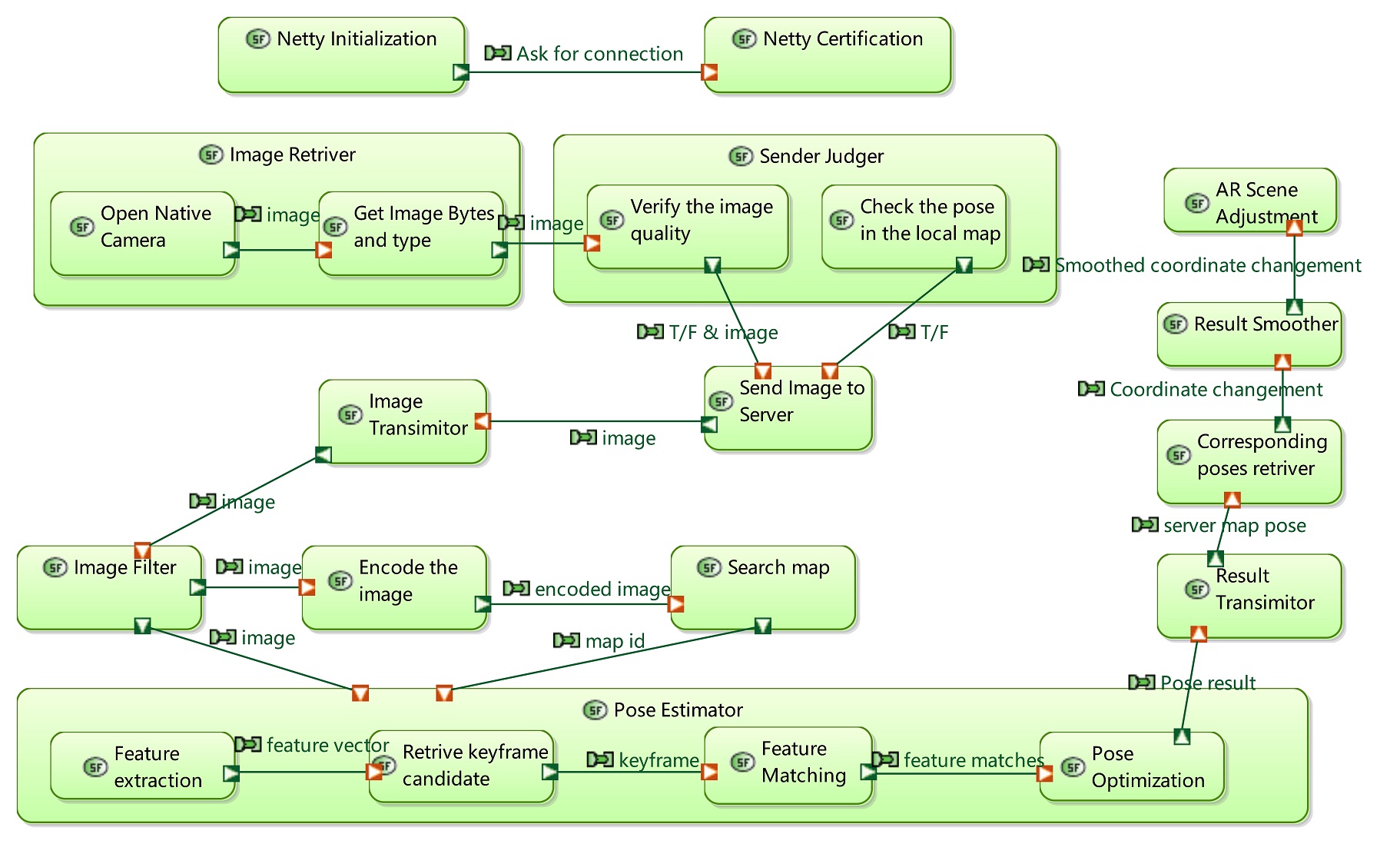
1.2 System Data Flow Blank¶
1.3 Scenario¶
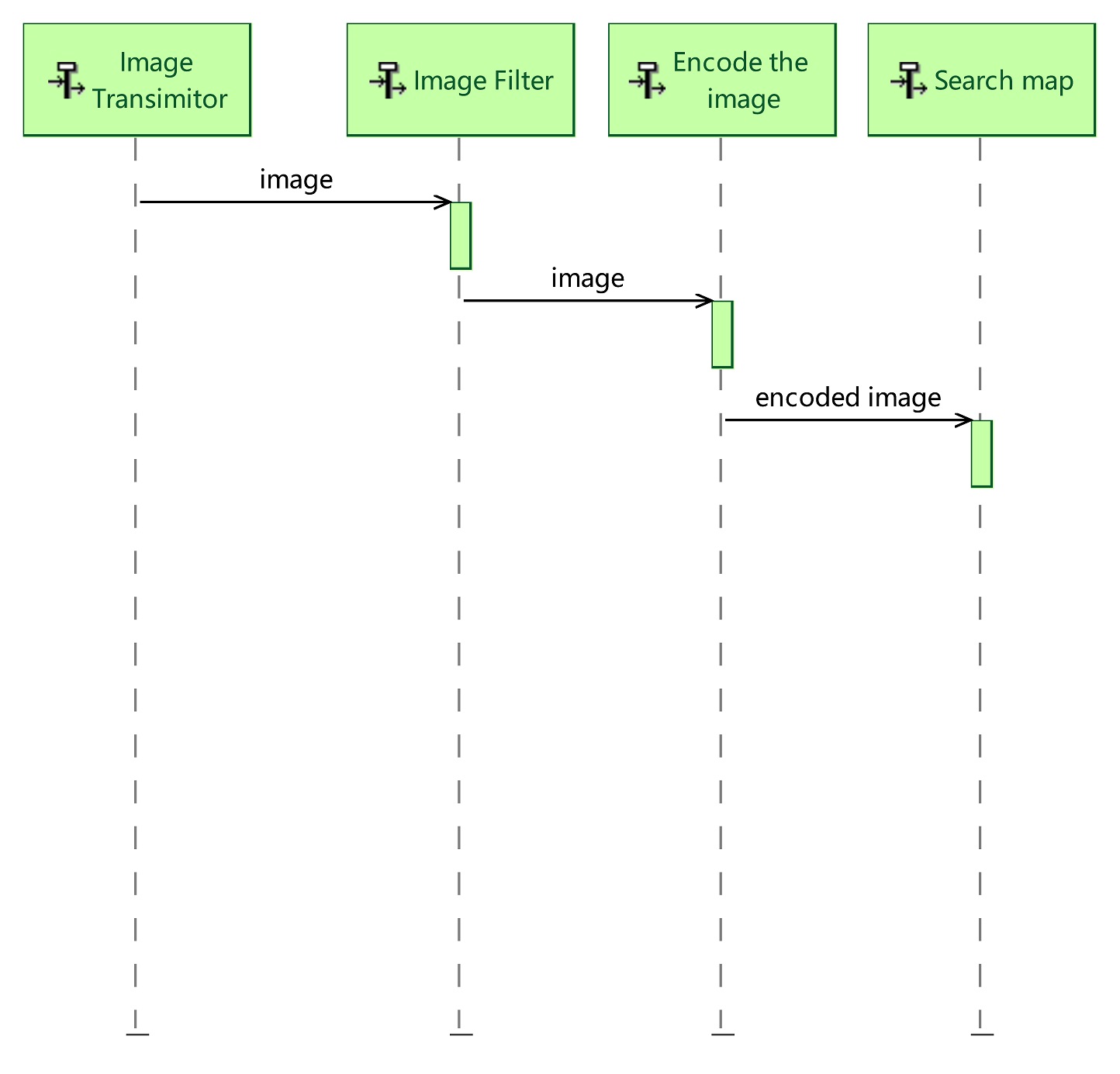
Send image:
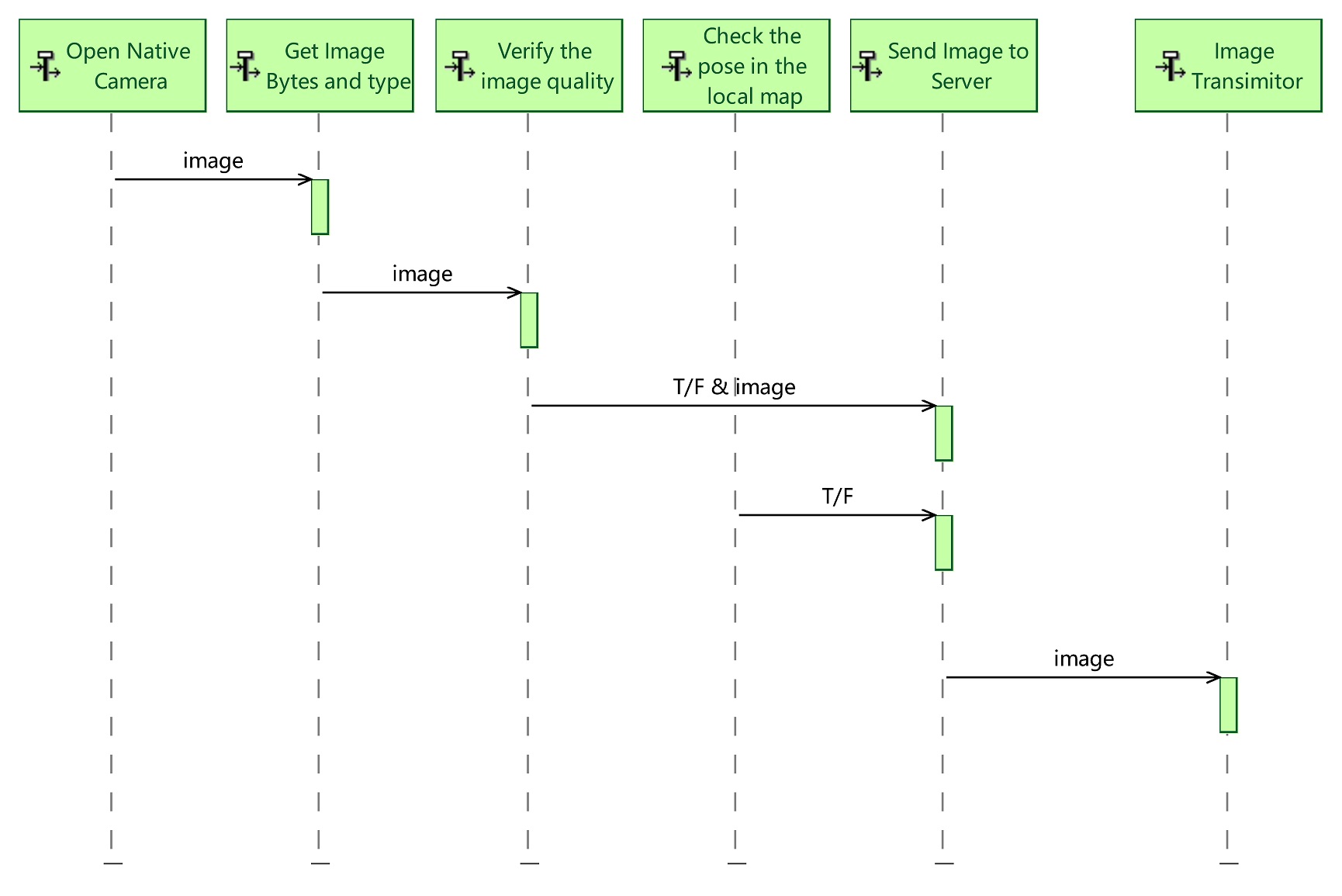
- Retrive image from the native camera(Using interface function offered by ArCore/ArKit/SLAM system).
- Get the correct format of image data and length, etc (for decode image bytes in the server).
- Verify the image quality (for an example, filter the blurred image).
- Also check the pose of the current AR camera, to filter images (for an example, facing the ground).
- If the image passed these upper two filtering stages, we will send the image to server.
- Image Transmittor belongs to the server, will transform the image to the next component for algorithm calculation.
Search the corresponding server map:
As we have multiple offline maps in the server, we need to first determine which map is this image belong to. To realize this function, we have two choice: one by GPS, and another by the following steps.
- Filter low quality image.
- Encode the image using deep learning method into a **global descriptor**(which could represent the whole image).
- Search in our map database by the global descriptor.
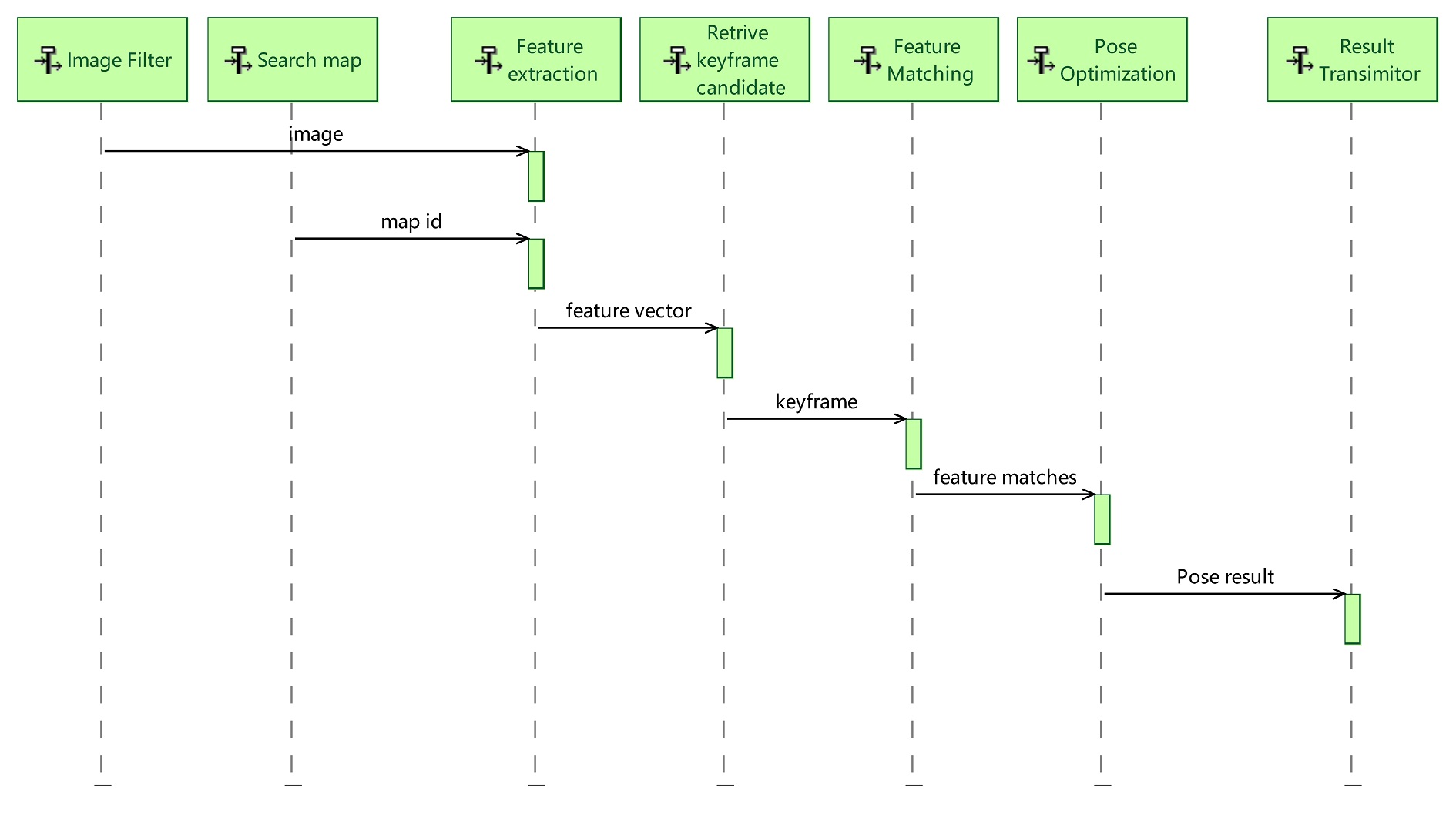
Calculate pose in the map:
- Get the corresponding image and the map (identify by its ID), to our algorithm built in server.
- Feature extraction , and image global descriptor calculation.
- Use global descriptor to retrive the best match keyframe, also filter badly matched keyframes with geometry validation.
- Use the keyframe as initialization, to find a suitable local map for further feautre matching step.
- Using the mathed features from the upper stage to estimate a pose, followed by outlier rejection (or robust estimation), and finally using optimization based method to get our final output.
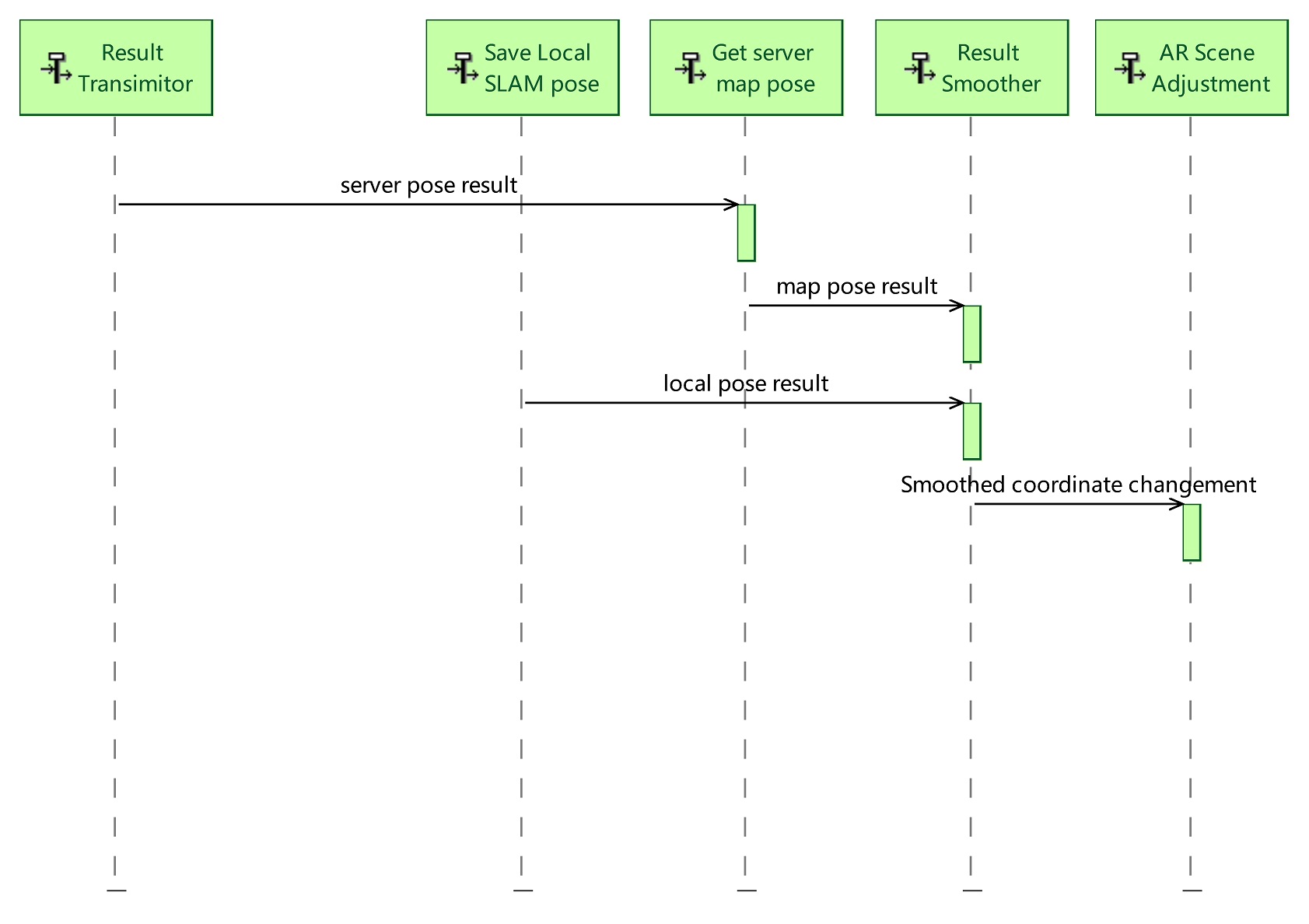
Fusion of the two coordinate system:
- Get the image’s pose in the local SLAM system (get by SLAM interface), and the pose in the server map coordinate system (get from server response).
- Calculate the relative transformation matrix of the two coordinate system (the local SLAM system , and the server map system).
- Using smooth method (we will use a Kalman filter) to find a better result.
- Adjust the virtual scene in the application, at the right moment, with the right method.