Local Map¶
Process the localization process at local devices.
- Make offline map, extract needed data.
- Make test data for development usage. (query images, and reference pose estimations)
- Use pose odometry result as initial pose to refine the pose with the map data.
1. Prepare the test data¶
Using the new version of my map (made by LiuYe), which is made using the image captured from our new scan application. Using tools_map for process. The map info
[MAP INFO] sparse feature map
camera number : 1
point number : 174385
image number : 1258
Saved localization binary map.
./Save_map /home/viki/Lucas/garden/garden_v2/database.db /home/viki/Lucas/garden/garden_v2/sparse/ /home/viki/Lucas/garden/garden_v2/SavedMap.dat /home/viki/Lucas/garden/garden_v2/keyframes.txt
Result in a 236Mb map file, with 1258 keyframes inside.
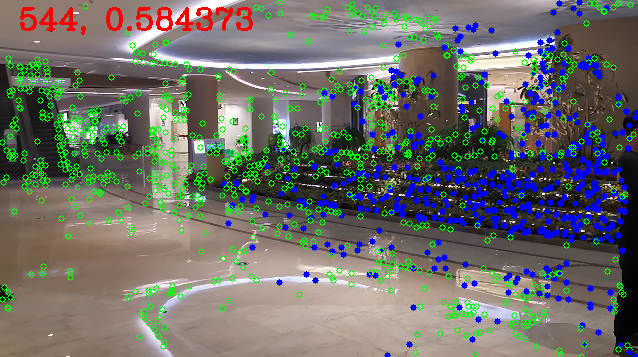
Image frames with pose localized using the BoW method (process using GPU acceleration)
./Test_video_images /home/viki/Lucas/garden/garden_v2/database.db /home/viki/Lucas/garden/garden_v2/sparse/ /home/viki/Lucas/garden/garden_v2/VocIndex.bin /home/viki/UTOPA/Server_Localization/Maps/winter_garden_test/ 596.1
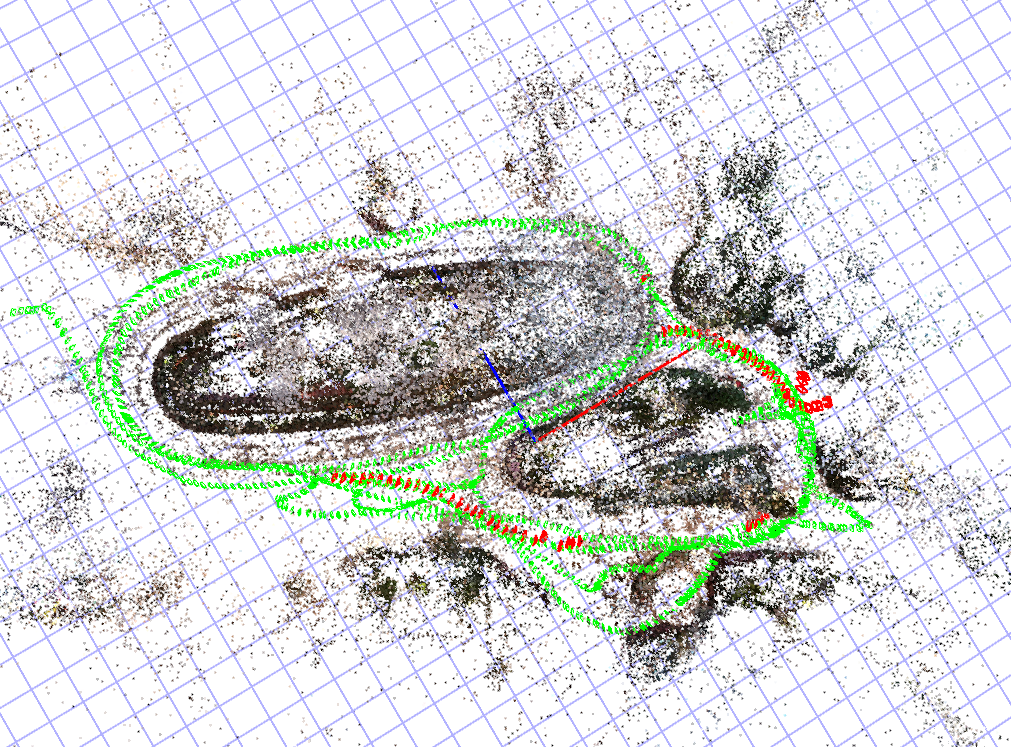
Here is the result pose show picture, with green frames being the reference keyframes, red frames being the localization result.
The performance show
==> Success rate 0.546154 [ 71 / 130 ]
==> Average time, success: 0.318083, fail : 0.388475
2. Local Region Tracking¶
Process pipeline:
- Find candidate frames using the pose differences.
- Project the map points to courrent frame (using the initial pose guess).
- Use PnP RANSAC to get final pose estimation.
- All the processes are done using CPU.
Parameters able to be changed:
- Number of features.
- Feature match search reigon radius.
- Feature descriptor match thresholds, orientation threshold, and scale thresholds.
- PNP RANSAC parameters.
Run in this project
./Test_video_images /home/viki/Lucas/garden/garden_v2/SavedMap.dat /home/viki/UTOPA/Server_Localization/Maps/winter_garden_test/ /home/viki/Lucas/garden/garden_v2/sparse/video_result.txt 596.1
==> Success rate 0.898734 [ 71 / 79 ]
==> Success average runtime : 0.521522
==> Average noise translation distance is 0.181593, Average estimated translation distance is 0.204277
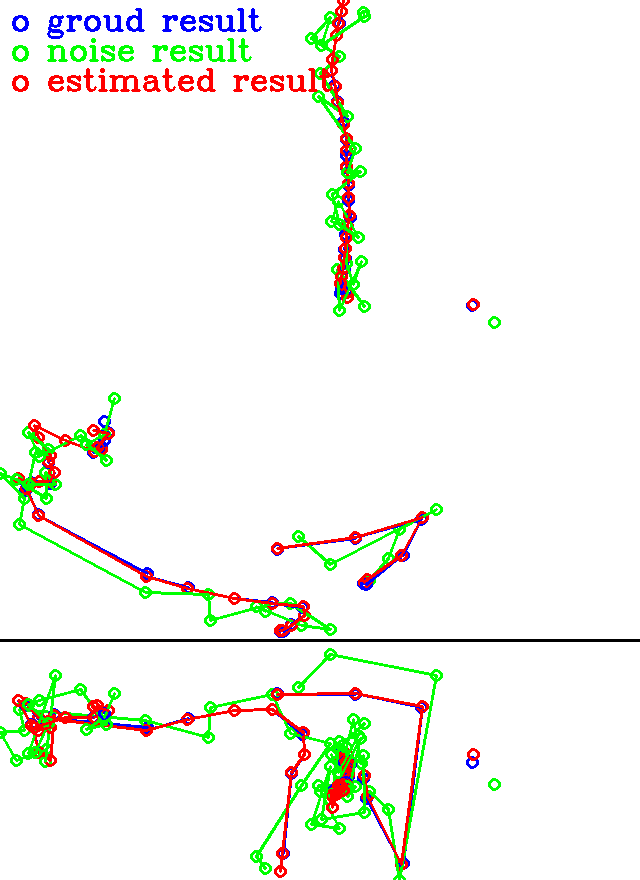
The result trajectory shown here (upper: top view, lower: side view):
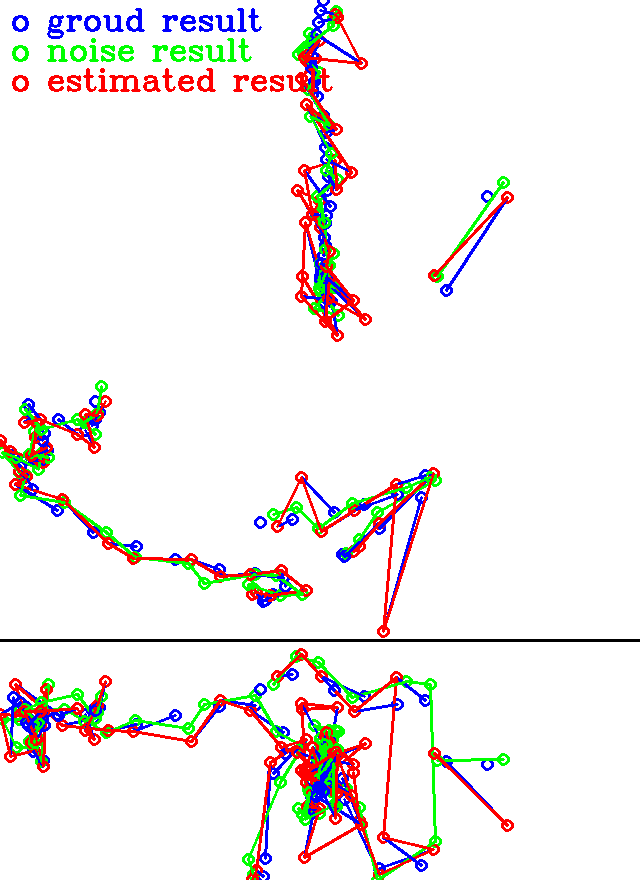
The algorithm could find some correct feature matches. While it was affected greatly by the noise. And the plants’ features are similar to each other, using the local matching process will surly produce error.
3. FLANN Match¶
I also run another method to compare:
- Candidate keyframes selection based on shared view.
- Two-way FLANN based feature matching.
- P3P-RANSAC based pose estimation.
- Ceres based pose refinement.
We got result
==> Success rate 0.802817 [ 57 / 71 ]
==> Success average runtime : 1.02683
==> Average noise translation distance is 0.276471, Average estimated translation distance is 0.023072
4. Comparison¶
I had run 3 tests (with different noise levels) for each of the upper methods, resulted in 6 results log in total. And the comparison of derivation was done with respect ot the result of the GPU colmap pipeline, which is not ground truth (that the reason I called it derivation rather than error). The tests are carried out in PC with Intel(R) Core(TM) i7-9750H CPU, 2.60GHz. Attention : the real scale of the test map is about 6, which means error 0.3 means about 1.8 meter in real world.
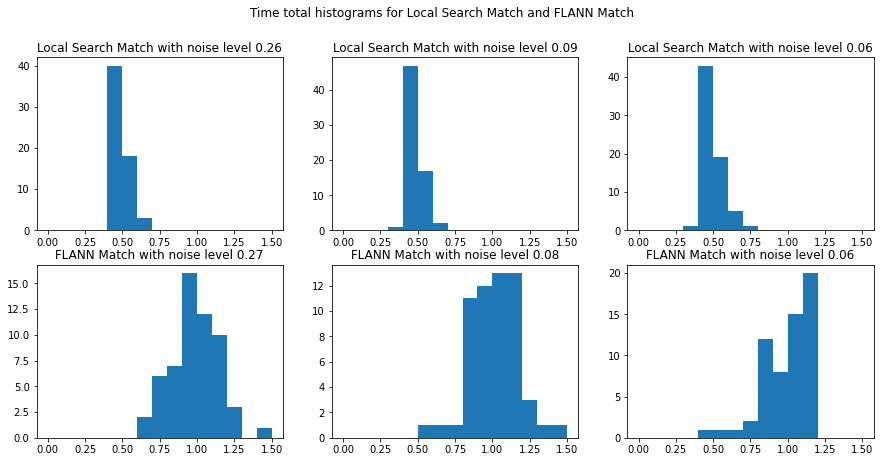
Average success rate and total runtime
Average time for Local Search Match is 0.4932324466465487
Average time for FLANN Match is 0.9969336698830409
Average success rate for Local Search Match is 0.8755555555555555
Average success rate for FLANN Match is 0.7733333333333334
Histogram of running time:
Histogram of derivation :
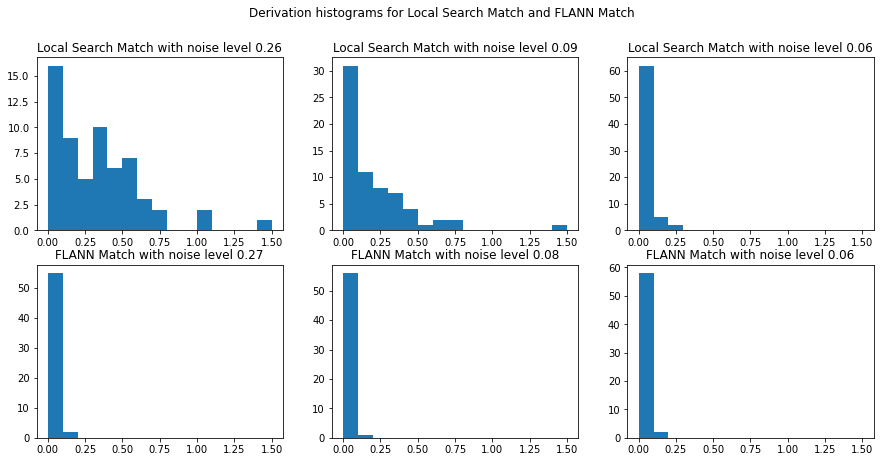
We found that the second method, the FLANN match method, is very robust and accruate, however it has a lower success rate, and is more computational expensive. I think the first method, the Local region match method, has more potention, as it is faster, and we can try to implement more tricks to achieve higher robustness and accuracy.
