M1. Operational Analysis¶
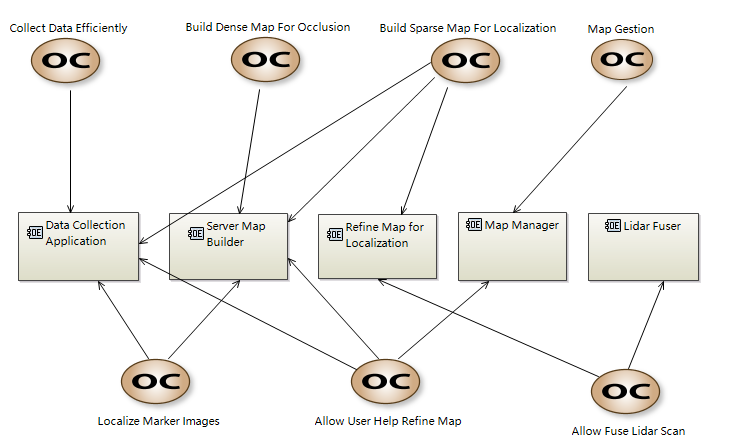
Here we show our main concern here : Our User Cases.
- To allow an efficient way of data collection, we develop a user-friendly data collection application.
- We will build both the sparse map (for single image localization) and dense map (for AR occlusion) from visual data.
- If user provides the marker image data in the map, we will also support a high accurate marker localziation process.
- If user provides the 3D lidar scan of the corresponding scene, we will support a calibration of the 3D Scan into our visual map.
- We will allow a fine manager tool for user to manager all the available maps.
The Data collection application will be built on mobile local devices, and the other entities will all built in the server.
