Visual Mapping¶
2022¶
 DM-VIO: Delayed Marginalization Visual-Inertial Odometry DSO-IMUS
DM-VIO: Delayed Marginalization Visual-Inertial Odometry DSO-IMUS
- Multi-stage IMU initializer. Dynamic photometric weight (decrease weight for overall bad image)
- Delayed marginalization (marginalization cannot be undone, but it can be delayed)
Long-term Visual Map Sparsification with Heterogeneous GNN use GNN to substitute the ILP method.
compare with the result using Keep it brief for map summarization.
2021¶
 GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation
It offers a complete model of GPS measurement. Makes fusion with GPS very solid.
GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation
It offers a complete model of GPS measurement. Makes fusion with GPS very solid.
 DSP-SLAM: Object Oriented SLAM with Deep Shape Priors
ORBSLAM2 + object tracking
DSP-SLAM: Object Oriented SLAM with Deep Shape Priors
ORBSLAM2 + object tracking
V-SLAM: Unconstrained Line-based SLAM Using Vanishing Points for Structural Mapping
Plucher coordinate line only has normal residual term, cannot fix degeneracy cases (line on epipolar plane).
This paper introduces a new residual based on vanishing point measurements.
2020¶
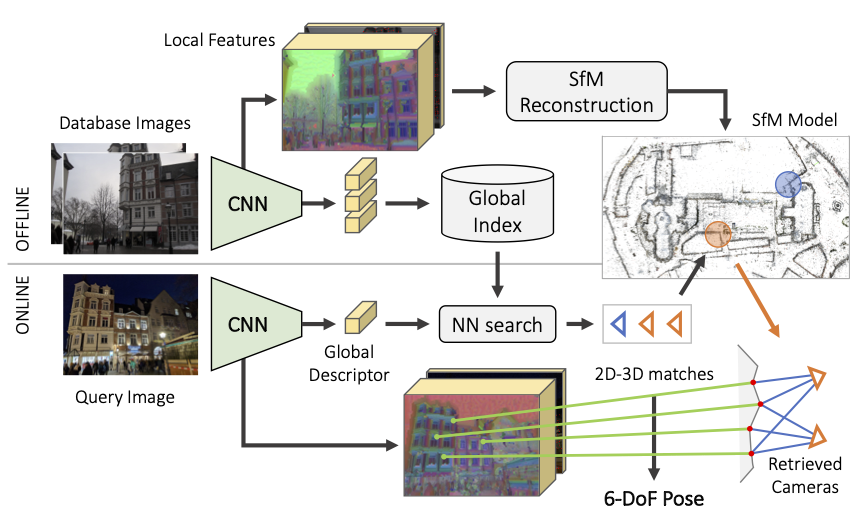
 hloc Hierarchical-Localization.
CVPR2020 winner.
hloc Hierarchical-Localization.
CVPR2020 winner.
- SuperPoint 2017, SuperGlue with colmap 2016 for building map.
- Hierarchical Localization 2019 for localization. (Roughly speaking, using NetVLAD 2016 match submap with a global descriptor, then match with reference image).
Online Invariance Selection for Local Feature Descriptors
Mainly for image retrieval.
A light-weight meta descriptor approach to automatically select the best invariance of the local descriptors given the context.
Learning the best invariance for local descriptors.
Online Visual Place Recognition via Saliency Re-identification.
github project .
- Perform both saliency detection and retrieval in frequency domain (2D Fourier transformation).
- Saliency map : IFFT of the difference w.r.t. average filtered log spectral. Kernel cross-correlator (KCC) to match.
- No offline trainning needed. Low cost, higher recall rate than DBoW2 (as shown in the paper).
Learning Feature Descriptors using Camera Pose Supervision,
use camera pose (re-projected distance to epipolar line) error as loss function to train NN.
Kapture: Robust Image Retrieval-based Visual Localization using Kapture
data-driven features. Instead of manually describing how keypoints or image descriptions should look like, a
large amount of data is used to train an algorithm to make this decision by itself.
Multi-View Optimization of Local Feature Geometry
Refining the geometry of local image features from multiple views without known scene or camera geometry.
Optimize feature keypoints’ position based on multiple views.
- Process feature extraction and feature matching steps.
- Calculate visual flow \(T_{u\to v}(x_{u})\) between feature matches (as the jacobians), using CNN method.
- Perform optimization for each feature track. Residual is weighted \((x_{v} - x_{u} - T_{u\to v}(x_{u}))\)
- Cross-Descriptor Visual Localization and Mapping.
- “translates” descriptors from one representation to another, using NN method.
Attention Guided Camera Localization.
Roughly speaking, MapNet 2018 with attention.
2019¶
OANet Learning Two-View Correspondences and Geometry
Using Order-Aware Network. In short, GNN based feature matches outlier rejection.
DIFL-FCL Domain-Invariant Feature Learning with Feature Consistency Loss.
Train DL features which are robust to environment change (using GAN to generate train set).
It may help when we are lack of real training images, while mostly it won’t happen.
Multi-Process Fusion .
Ensemble methods for image retrieval process.
Large-scale, real-time visual-inertial localization revisited
review of different methods, finally use Keep it brief for map summarization.
2018¶
ToDayGAN. Use GAN to transform night image to bright day, then use the
transformed image for image retrieval task.
Efficient adaptive non-maximal suppression algorithms for homogeneous spatial keypoint distribution
- ANMS(Adaptive non-maximal suppression) based on Tree Data Structure (TDS).
- Suppression via Square Covering (SSC)
2015¶
Keep it brief: Scalable creation of compressed localization maps
use ILP (integral linear programming) to solve the summerization problem. (worth try)
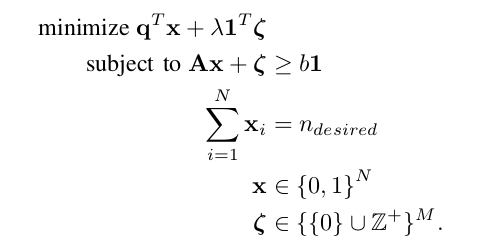
- use google ortools to solve the ILP problem.
- use SNAP to analysis the vision map graph.
- tried this method in our benchmarks (keep 10% the map points, mean image observations drop from 1300 to 200), the localization result dropped within 10%.
