Lidar SLAM¶
LOAM¶
- LOAM use a new defined feature system (corner and flat point), for the detail see its article.
- LOAM suppose linear motion within the scan swap (VLOAM further uses visual odometry to estimate it), and undistort the lidar points.
- LOAM has a low frequence optimization thread.
A-LOAM¶
- LOAM has IMU refinement.
- Lack feature filter in A-LOAM.
- LOAM implies the LM solver itself. A-LOAM uses Ceres solver.
- LOAM use analytical derivatives for Jacobians, but A-LOAM uses the automatic derivatives offered by Ceres (which is exact solution but a little bit slower).
Performance:
- A-LOAM seems good,less redundant points.
- but has more error in far edges.
- LOAM method has no assumption of a consistent “floor”, that is better for our case.
- A-LOAM has the same logical with LOAM, but its performance is much worse.
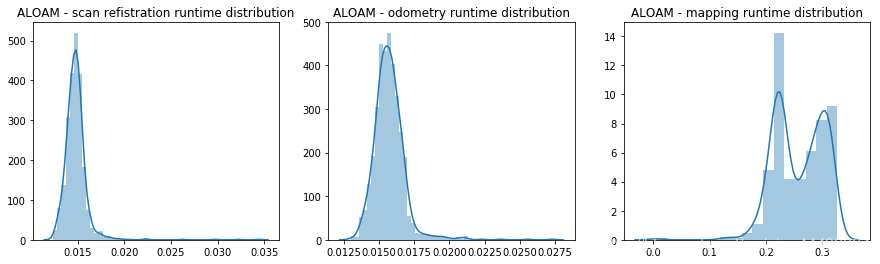
- ALOAM - scan refistration the maximum time is : 0.034434 the mean of time is : 0.0148146394612
- ALOAM - odometry the maximum time is : 0.027296 the mean of time is : 0.0157431030928
- ALOAM - mapping the maximum time is : 0.326849 the mean of time is : 0.257764385093
LeGO LOAM¶
vs LOAM:
- Faster and similar accuracy as LOAM, and has a better global map visual effect.
Difference LOAM:
- Add segmentation before processing (gound extraction and image-based segmentation)
- Sub-divide the range image before feature extraction → more evenly distributed features.
- Label match
- Two step LM. Seperate the optimization based on different property of edge and planar points. Becomes faster while similar accuracy.
- Difference map storage method, can use pose graph optimization and use loop closure.
Performance:
- lego slam has the best result, error is small.
- Flat plane has good look, achieve a dense map, while keep its consistence.
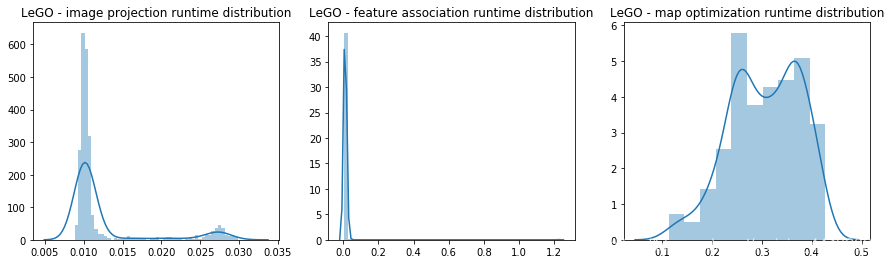
- LEGO LOAM - image projection the maximum time is : 0.029819 the mean of time is : 0.0123906096595
- LEGO LOAM - feature association the maximum time is : 1.226773 the mean of time is : 0.0126770831335
- LEGO LOAM - map optimization the maximum time is : 0.427468 the mean of time is : 0.30585172524
For one input scan, it takes 0.0249s in average. It is about 25% faster than ALOAM.
HDL-GRAPH-SLAM¶
- It is basically a graph optimization algorithm.
- Use ICP-based or NDT-based methods to register new point cloud, and match candidates of loop closure.
- Assumed a shared ground plane.
- For the graph optimization part, it use the most sample edge for consecutive frames, along with the floor observation edge.
- Too simple loop closure processing.
- In summary, it uses the most basic algorithms, however it has a complete structure.
Performance:
- not that much error for the far points, as it has loop closure
- lots of redundant points as it has no optimization on point cloud, floors and walls are very thick in the global map.
- HDL - prefiltering the maximum time is : 0.395365 the mean of time is : 0.00943357786885
- HDL - floor detection the maximum time is : 0.856617 the mean of time is : 0.0456638586777
- HDL - odometry the maximum time is : 0.309964 the mean of time is : 0.0742533234078
- HDL - graph slam the maximum time is : 2.140327 the mean of time is : 0.13695704878
Its processing time is much more than the other two methods, as it use NDT, while the other use feature points.
IMLS-SLAM¶
Implicit Moving Least Squares(IMLS) surface represetation is used to handle large amount and sparisty of acquired data. It makes me proud to see some schoolmates made such a contributional work. paper
Pretreatment¶
- Unwarp lidar scan, It is done b linear interploation using the last relative pose.
- remove small size segmented point cloud, and grouped cloud with small bounding box.
Scan sampling¶
- Classic ICP uses random sampling method, this may fail in many cases.
- A selected suitable sampling method was proposed to improve ICP. But computational expensive.
- This article proposed a sampling method based on the observability of the point of different angle and of the unkown translations. To choose better and fewer points for matching.
Scan-Model Match¶
- Kinect fusion uses TSDF for scan-to-model match, but TSDF surface is defined by a voxel grid (empty . SDF, known) and then is usable only in a small volume space. As a result, TSDF cannot be used in large outdoor environment.
- This article uses IMLS (Implicit Moving Least Square) surface (the set of zeros of a function)
VIL-SLAM¶
It is a Stereo Visiual Inertial Lidar SLAM. Compared to VLOAM, this work uses a tightly coupled VIO (VLOAM uses a loosely coupled one), and VIL-SLAM has a Lidar enhanced loop closure. paper
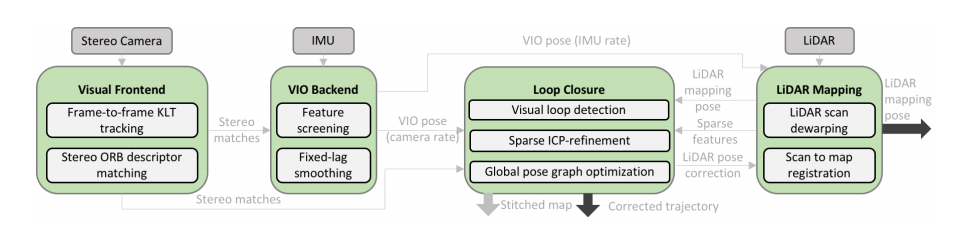
- Stereo visual KLT optical flow tracking and ORB feature matching.
- IMU preintegartion, and tightly coupled VIO (until this part, it is tha same as VINS-Fusion).
- Use the VIO output pose to unwarp the lidar scan. And registre the scan by Edge and planar points (LOAM method)
- Loop clousre.
- Propose candidates by Bag-of-Words.
- PnP(Perspective-n-Point) to obtain relative pose initial estimation (of VIO).
- Use ICP to refine the estimation (of Lidar Odometry).
In my point of view, this work is a mixture of a tightly coupled VIO (VINS) and a loosely coupled Lidar Visual (VLOAM). Can be seen as a update version of V-LOAM.
